Monoid

monoid=magma+associativity+identity
Magma
A magma is a set M matched with an operation • that sends any two elements a, b ∈ M to another element, a • b ∈ M, i.e. $(M,\cdot)$ is a magma, if
Determinant of 3x3 matrix and its derivative
By applying Leibniz rule for vector and dot product,
Hessian Matrix
Determinant
Properties:
Property 1
Let $A\in R^{n\times n}$
$-1$ can be replaced by any number $c$
Property 2
Multiply one column (or one row) by $k$,
The determinant of the new matrix is k times the determinant of the original matrix.
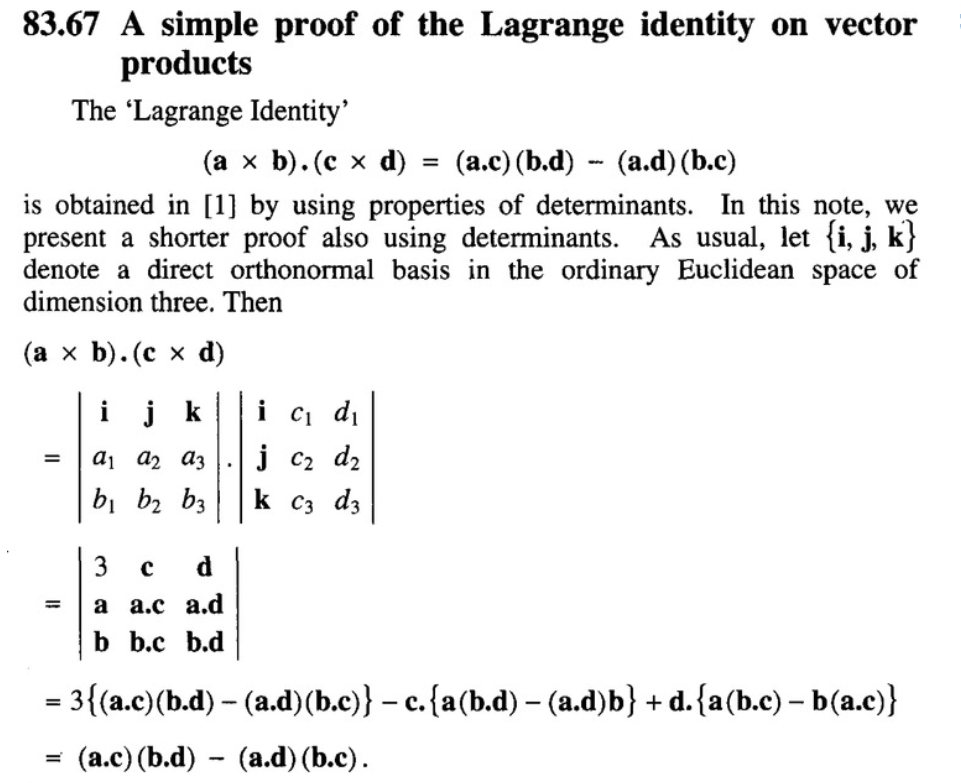
Properties about Cross Product
For $a,b,c,d\in \mathbb{R}^3$:
which is also know as the vector triple product.
whose proof is given here:
Property of Orthonormal Matrix
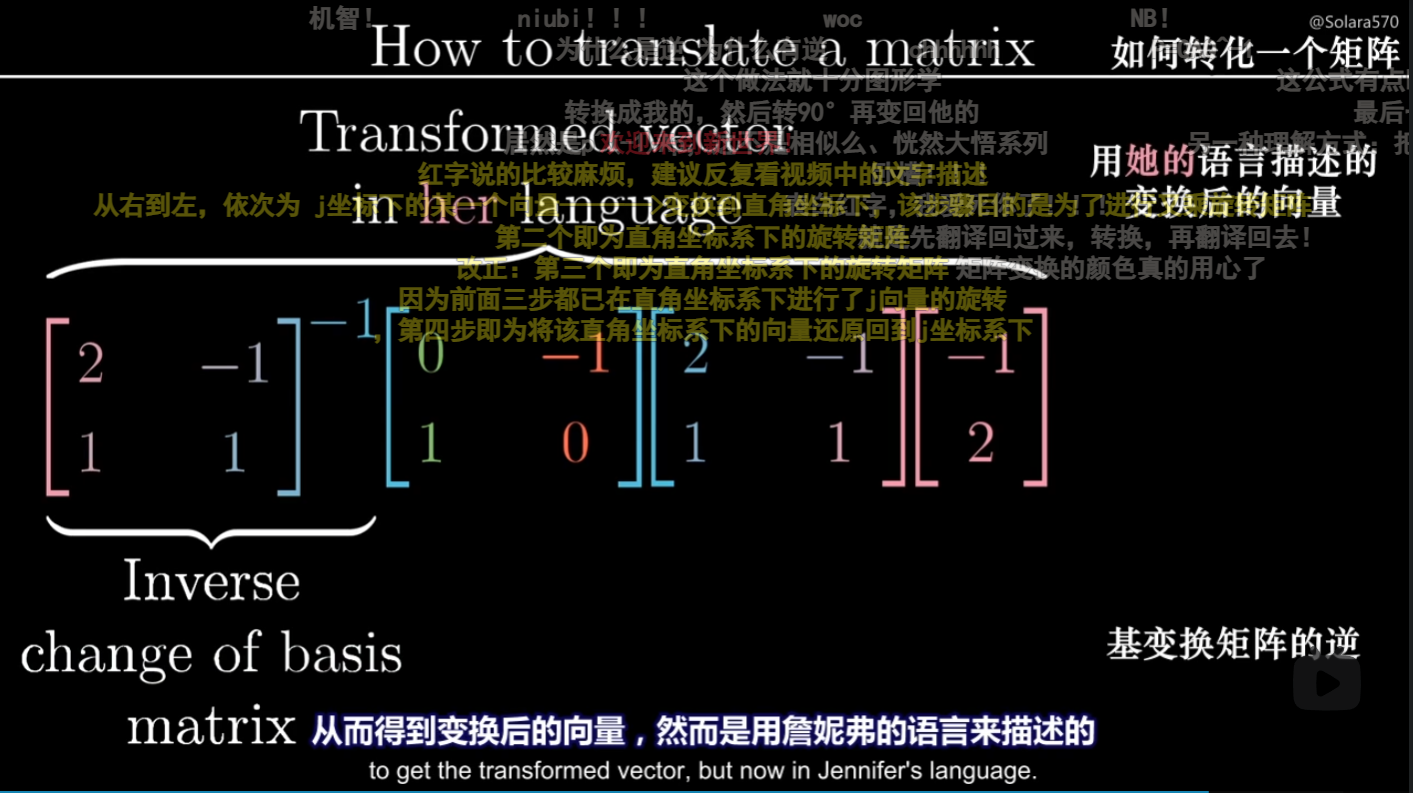
Linear Transformation In Transformed Basis
where $P$ is the basis of the transformed basis (new basis) in the standard basis (our basis) and $A$ is the transformation in the standard basis.
Rotation Matrix
rotates points in the $xy$ plane counterclockwise through an angle $\theta$.
Judge whether a matrix is a rotation matrix
A matrix is a rotation matrix iff $R^T=R^{-1}$ i.e. $R^TR=I$ and $detR=1$
Calculate the axis of the rotation matrix
The axis of the rotation matrix stays unchanged after rotation, i.e. $Rx=x$, $(R-I)x=0$
Solving the equation and we get the axis of the rotation.
Calculate the rotation angle of the rotation matrix
Choose a random vector, usually $v=(1,0,0,…,0)$. Therefor, $w=Rv$, i.e. $v$ after rotation, is the actually the first column of $R$ (or you can just do the calculate).
Let $a$ be the vector representing the axis of the rotation.
We can use $v’=v-\frac{aa^T}{a^Ta}v$ to get the vector perpendicular to the axis while pointing from the axis to the end of $v$. Similarly, use $w’=w-\frac{aa^T}{a^Ta}w$ to get the vector perpendicular to the axis while pointing from the axis t othe end of $w$.
It’s easy to find that $Span(v’,w’)$ is perpendicular to the axis $a$. Therefor, the angle between $v’$ and $w’$ is the angle of the rotation, i.e. $\arccos(\frac{
QR Factorization
Reference: this video and this video(better, starts at 25:30)
Nullity of a Matrix
Basically, the dimension of the null space.
Null Space / Kernel of a Matrix
Reference: this video and this video(talks about how to calc)
The null space of $A$ is all solution $x$ (a vector), s.t. $Ax=0$. Often denoted as $N(A)$ or $ker(A)$
Rank of a Matrix
Basically, the dimension of the column space.
Reference: this page
It tell you how to calc the rank of a matrix.
Projection Matrix
Reference: this page
Use Ctrl+F to search for the Projection Matrix part, in which you can find how to solve projection matrix onto certain space.
A projection matrix onto a col space of $Q$ is:
Specifically, if $Q$ is a square orthonormal matrix, then $P=I$